Roboty STIGA oparte na AGS w praktyce. Wyklikałem swój ogród w mniej niż 5 minut - tak, to takie proste
Konfiguracja robota koszącego jeszcze nigdy nie była taka łatwa. Teraz każdy może to zrobić sam, w kilka minut, czasem nawet... nie wstając prawie od komputera.
Wprawdzie proces konfiguracji robotów STIGA z AGS od zawsze był banalnie prosty, ale od czasu debiutu tego rozwiązania minęło już trochę czasu i wszystko stało się jeszcze prostsze. Na tyle prostsze, że teraz właściwie każdy może w kilka chwil precyzyjnie zainstalować, uruchomić i skonfigurować swojego robota koszącego.
Robot koszący STIGA z AGS - jak wygląda konfiguracja?

Tak łatwo, że łatwiej już być nie może. W optymalnym wariancie całość może nam zająć raptem kilka minut. Albo nawet mniej.
Na początek warto wiedzieć o jednej rzeczy - w odpowiednie moduły łączności, w tym moduł lokalizacyjny, wyposażony jest zarówno robot koszący, jak i jego stacja referencyjna, i kluczowe dla prawidłowej pracy całego systemu jest to, żeby oba elementy miały jak najlepszy zasięg. Co z kolei oznacza, że im bardziej otwarta przestrzeń bez żadnych przeszkód, tym lepiej.
Nie oznacza to jednak na szczęście, że będziemy musieli postawić stację referencyjną na środku ogrodu, żeby uzyskać upragniony rezultat - wręcz przeciwnie, stacja referencyjna może się znaleźć w zupełnie innym miejscu, np. pod dachem tuż przy domu. Moduł lokalizacyjny można bowiem wyjąć ze stacji i zamontować w dowolnie pasującym nam punkcie - w moim przypadku np. został zainstalowany na maszcie na dachu domu, żeby poprawić jakość sygnału. Mało tego - z systemem STIGA AGS zewnętrzny moduł lokalizacyjny może się znaleźć poza obszarem koszenia.

Oczywiście nie ma obowiązku przeprowadzania instalacji w takiej formie - może się zdarzyć, że miejsce, w którym zaplanujemy ustawienie stacji dokującej będzie się idealnie do tego celu nadawać również pod względem łącznościowym - jakość sygnału komórkowego i lokalizacyjnej sprawdzimy przy tym błyskawicznie w aplikacji Stiga.GO, więc po podłączeniu całości do zasilania będziemy mogli na spokojnie wybrać, gdzie i jak należy wszystko zainstalować.
Do czego w ogóle służy stacja referencyjna w systemie STIGA AGS?
Stacja referencyjna - albo moduł referencyjny, jeśli zdecydujemy się go wymontować z urządzenia - określana również jako stacja wzorcowa, jest stałym elementem przestrzennym systemu, dlatego też po instalacji nie należy jej przesuwać (albo należy wtedy ponownie wyznaczyć obszar koszenia). Pomaga nie tylko ustalić granice obszaru koszenia, ale też odbiera sygnał z satelitów lokalizacyjnych i przygotowuje dane korekcyjne dla robota koszącego, na wypadek, gdyby tam niżej dostęp do sygnału z satelitów był słabszy. Rezultatem takiej współpracy jest właśnie m.in. poruszanie się robota koszącego z precyzją sięgającą zaledwie 2 cm.
Komunikacja realizowana jest przy tym za pośrednictwem 4G, więc nie ma znaczenia, jak daleko znajduje się robot od stacji referencyjnej - liczy się tylko to, czy jest w zasięgu sieci komórkowej. Słyszałem nawet o ekstremalnym przypadku, gdzie stacja wzorcowa znajdowała się... wiele kilometrów od ogrodu, w którym realizowane było koszenie. I wszystko działało jak trzeba.
Co istotne - nie musimy zgadywać, czy w naszym ogrodzie jest odpowiedni zasięg sieci, żeby taka forma komunikacji była możliwa. Możemy to w kilka sekund sprawdzić z pomocą nowej wersji aplikacji Stiga.GO:

Aplikacja pozwoli zresztą nie tylko sprawdzić ten element konfiguracji - z jej pomocą w kilka minut możemy również sprawdzić przybliżoną powierzchnię naszego trawnika, a także określić jego parametry i na tej podstawie dostaniemy informację, jakego robota koszącego powinniśmy wybrać.
W moim przypadku kilka kliknięć wystarczyło, żeby zawęzić wybór do 2-3 modeli, gdzie ostateczną decyzję podejmowałbym głównie na bazie tego, czy chciałbym potencjalnie kosić jeszcze większą powierzchnię ogrodu. Albo inaczej - jaki chciałbym mieć zapas wydajności.

Nie trzeba więc od razu pędzić do sklepu i tam dowiadywać się, jakie są opcje i jakie roboty koszące mogą nam pasować. Aplikacja Stiga.GO zrobi to właściwie za nas, a my będziemy mogli się skupić na tym, czy potrzebujemy jakiegoś "zapasu", czy może wystarczy nam mniejszy model (w moim przypadku proponowana była Stiga A 1000 i A 750).
Czyli najpierw ustawiamy stację i sprawdzamy zasięg. Co dalej?

Na dobrą sprawę mamy dwie opcje - jedną prostą i drugą... jeszcze prostszą.
Tą prostą jest dobrze już znane zdalne sterowanie robotem, żeby wyznaczyć granice obszaru koszenia. Całość przypomina trochę jazdę zdalnie sterowanym samochodem, tyle tylko, że trasa przejazdu robota koszącego jest nieustannie zapisywana i tam, gdzie przejedziemy, na mapie pojawi się po prostu granica naszego trawnika.

W identyczny sposób wyznaczamy też strefy, do których robot ma nie wjeżdżać, przeszkody oraz trasę, którą ma powracać z obszaru lub obszarów koszenia do stacji ładującej.
Takie rozwiązanie jest proste, skuteczne i zajmuje niewiele czasu, ale może być jeszcze łatwiej. Obecnie, jeśli konfigurujemy nowego robota koszącego STIGA z AGS, już na samym początku dostaniemy informację, że niemal całą konfigurację możemy przeprowadzić z poziomu wygodnego fotela przed komputerem - i tak, to prawda.
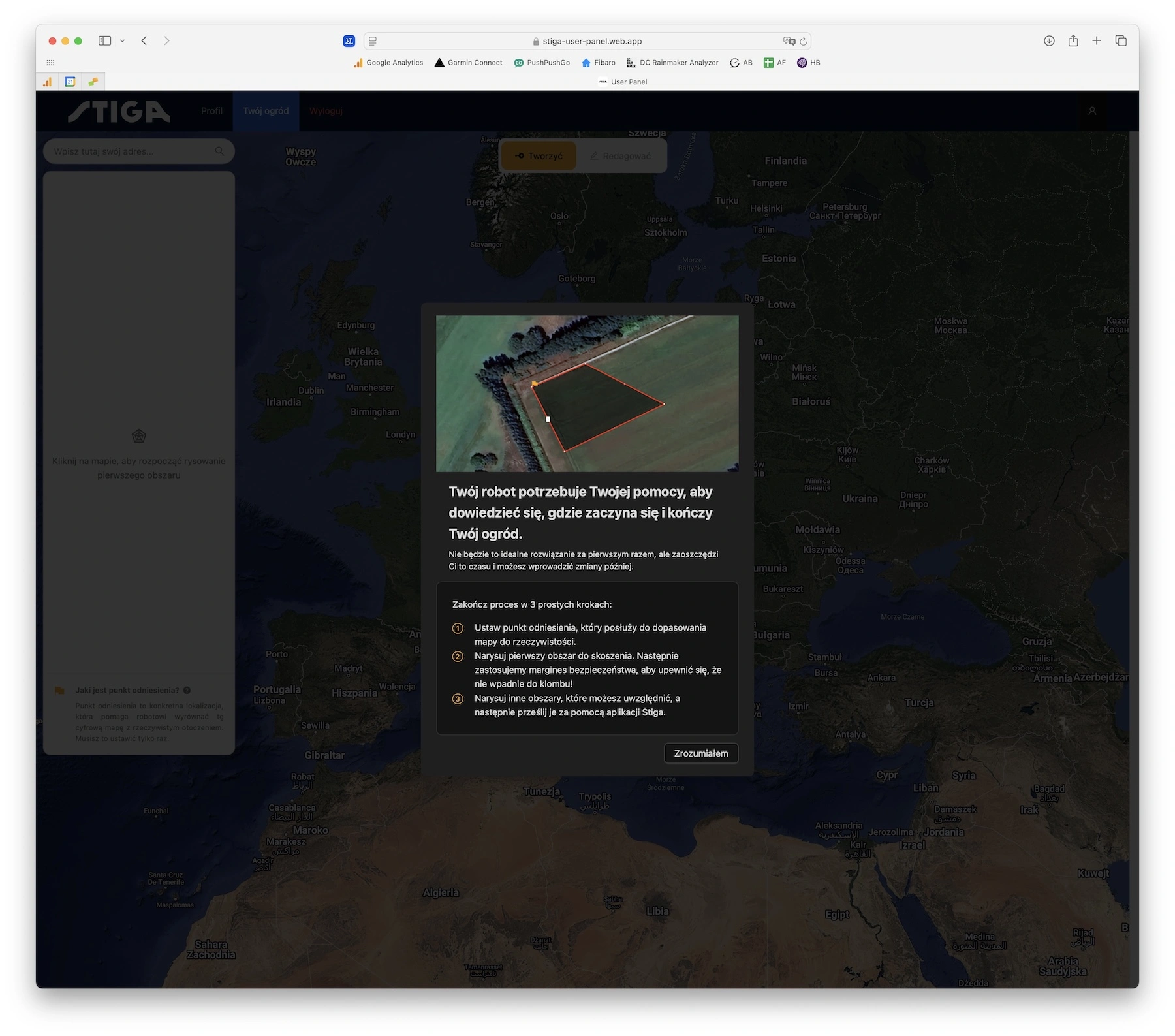
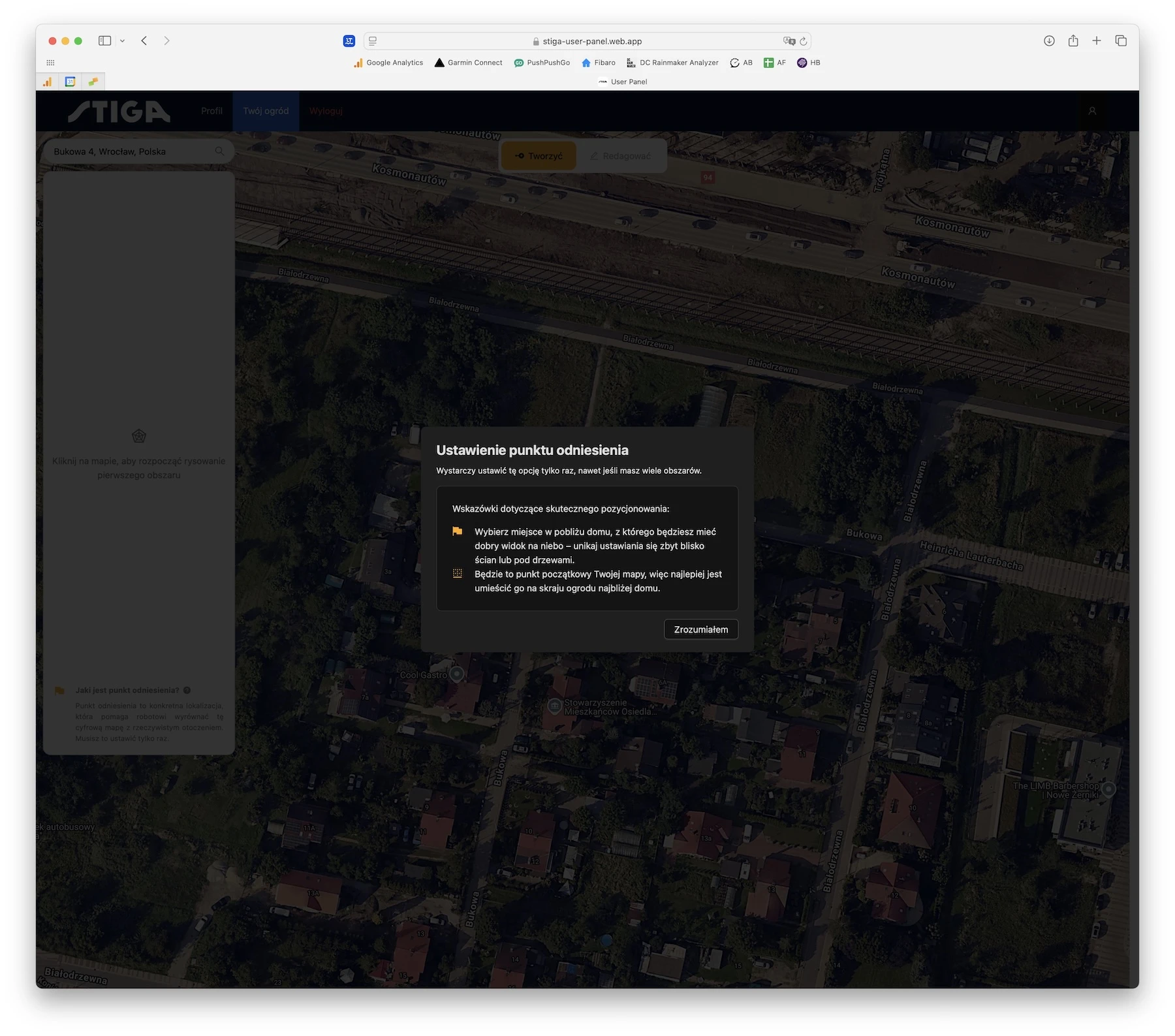
Wystarczy zalogować się na nasze konto w serwisie STIGA, wybrać lokalizację naszego ogrodu, następnie wybrać punkt odniesienia - o którym za chwilę - a potem narysować obszar koszenia.
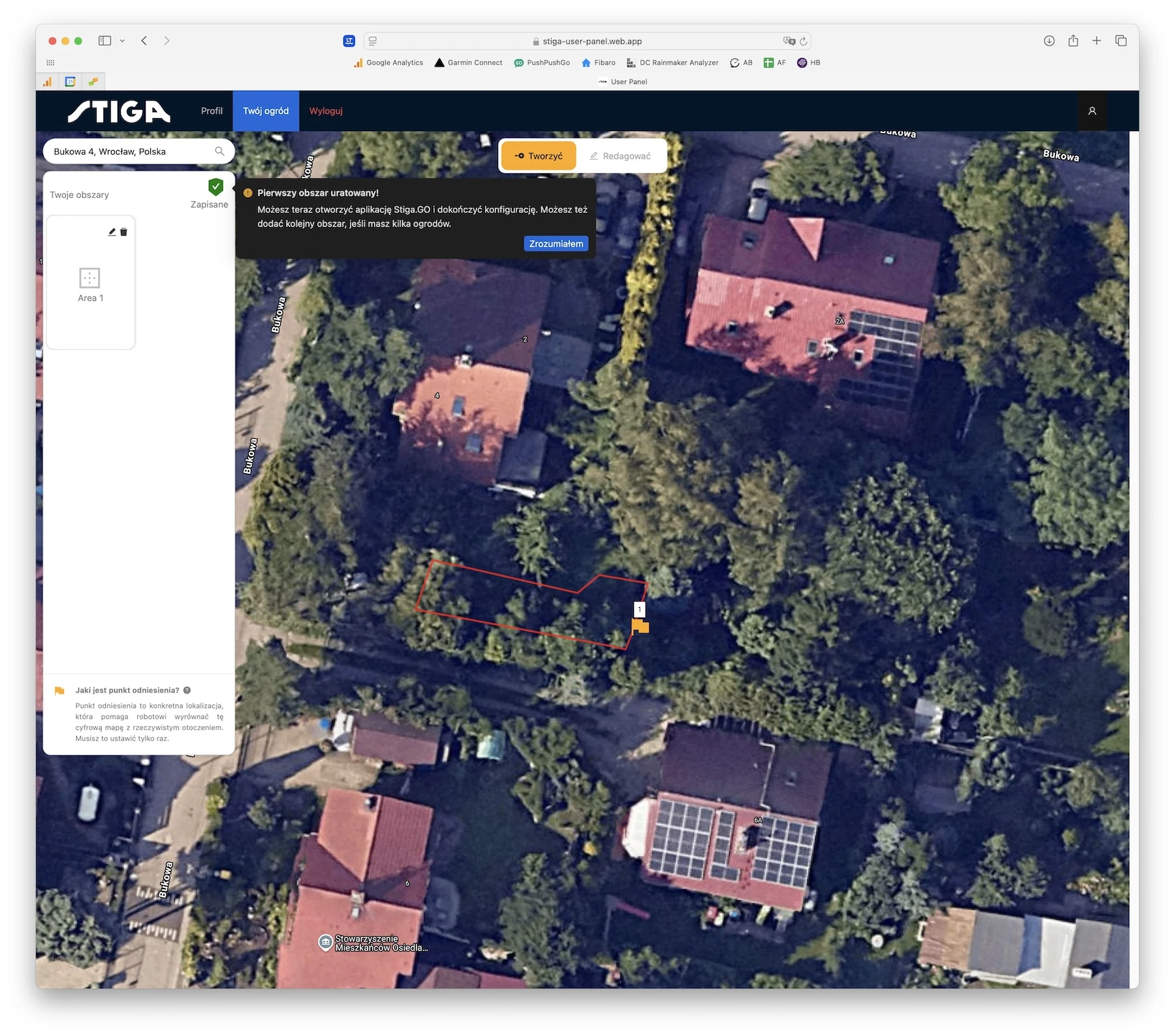
Rysujemy więc na szybko jeden z planowanych obszarów koszenia:
I dopiero teraz wychodzimy na dwór do robota. Jeśli odpowiednio precyzyjnie ustaliliśmy punkt odniesienia i trafimy do niego robotem, właściwie nic więcej nie będziemy musieli robić.
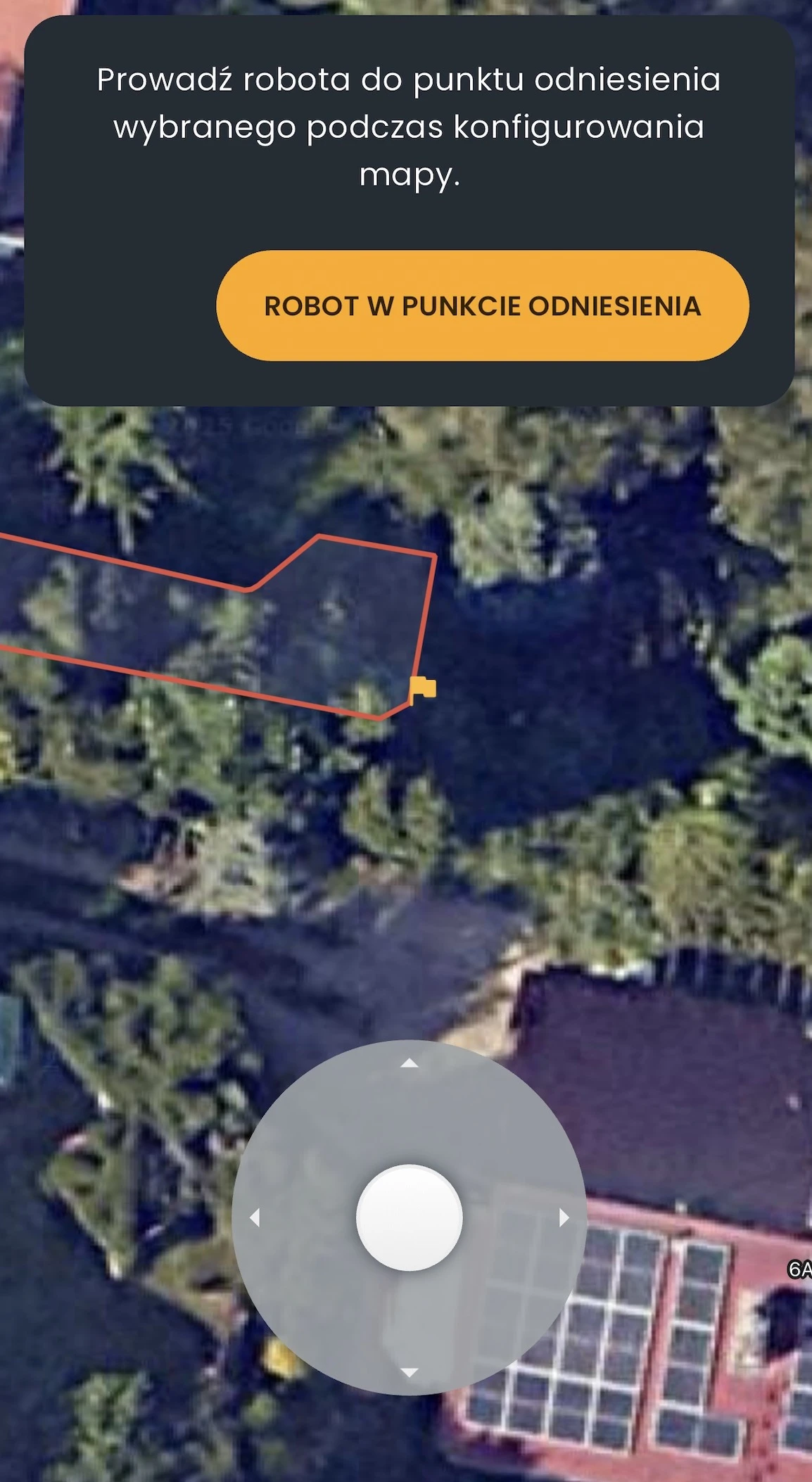
W tym momencie robot STIGA z AGS zacznie bowiem sam podążać po wyznaczonej granicy, a naszym zadaniem będzie sprawdzanie, czy wszystko jest tak, jak należy. Jeśli nie będzie - możemy oczywiście samodzielnie poprawić wybrane granice, oznaczając punkty, między którymi wymagana jest korekta, a potem - sterując robotem - wprowadzając zmiany.
W moim przypadku niezbędne były tylko niewielkie korekty, wynikające głównie z faktu, że obszar trawnika narysowałem "na szybko". Gdybym poświęcił temu odrobinę więcej czasu, moim jedynym zadaniem w ogrodzie byłoby narysowanie "nitki" łączącej obszar koszenia ze stacją ładowania i... to wszystko.
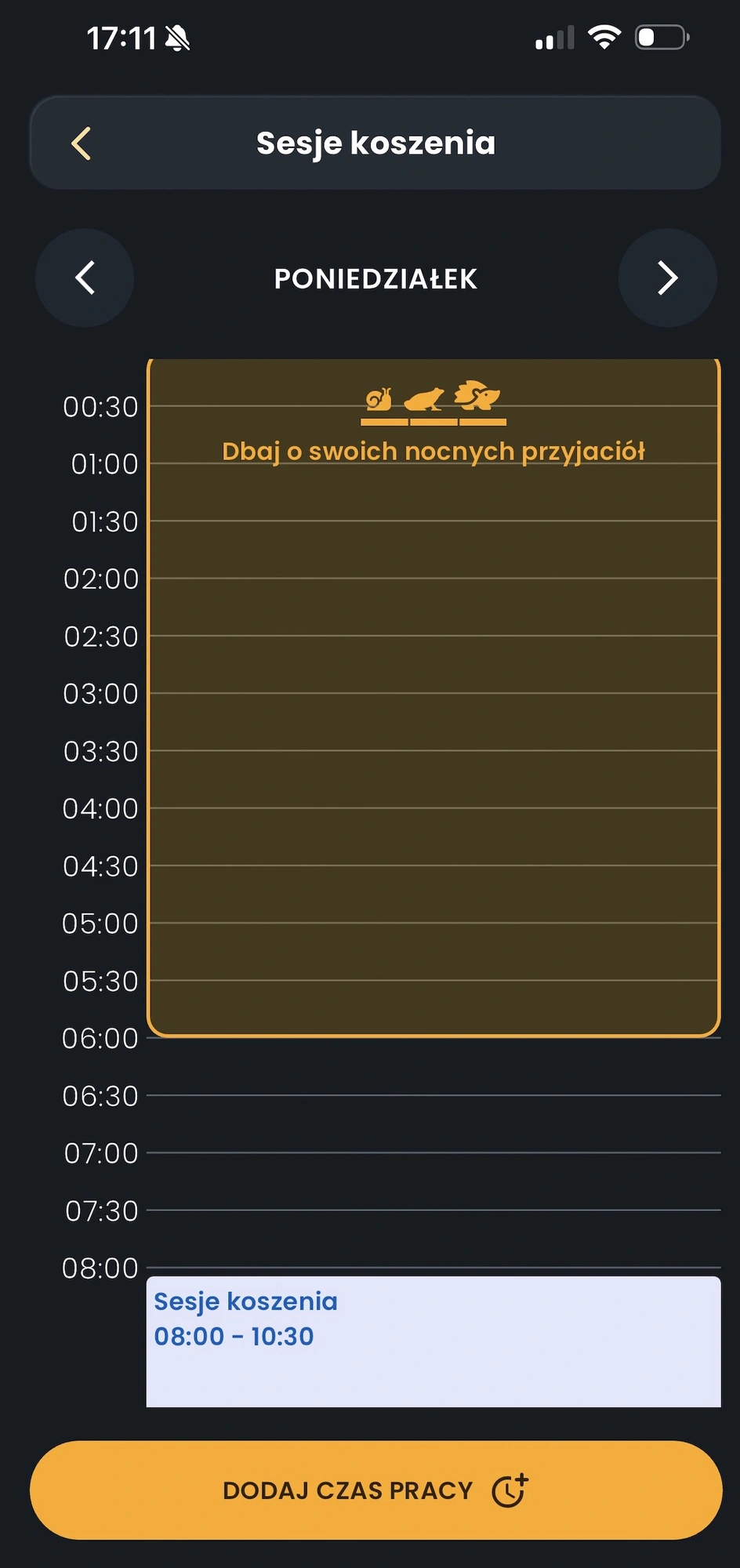
Teraz, jeśli nie chcemy się zagłębiać w dodatkowe opcje, wystarczy wyznaczyć harmonogram koszenia, zapisać zmiany i od tego momentu cieszyć się idealnie skoszonym trawnikiem. Co ważne, nawet jeśli nie mamy pomysłu na to, ile razy dziennie powinien być koszony nasz trawnik, w jakich odstępach i jak długo - aplikacja skutecznie nam to podpowie. Wystarczy zaakceptować jej sugestie i najwyżej potem sprawdzić, czy wszystko jest tak, jak należy.
Łatwiej i bardziej bezwysiłkowo się chyba nie da.
To jednak nie wszystko, co można ustawić.
To wręcz dopiero początek, bo liczba opcji konfiguracyjnych jest na tyle ogromna, że istnieje szansa na to, że robot koszący STIGA z systemem AGS zadziała niezależnie od tego, jak duży i jak skomplikowany mamy ogród. I przy okazji udało się też w pełni wykorzystać możliwości, jakie daje taki bezprzewodowy system.
Przede wszystkim mamy pełną dowolność w tworzeniu stref koszenia i połączeń między nimi - nawet zalecane jest, żeby podzielić ogród na kilka takich stref przy pierwszej konfiguracji. Dlaczego? Bo w razie ewentualnych późniejszych zmian w ogrodzie będziemy mogli później łatwiej wprowadzić modyfikacje w zakresie tego, gdzie robot powinien kosić.
I to jest coś, w czym roboty z systemem STIGA AGS biją na głowę swoich przewodowych odpowiedników. Mamy pomysł na to, żeby zamiast kawałka trawnika zrobić oczko wodne albo skalny ogródek? Przy przewodowym ogrodzeniu obszaru koszącego oznacza to masę pracy, żeby system działał jak trzeba. Przy systemie AGS po prostu rysujemy na nowo ten fragment strefy i... gotowe. Zero wysiłku. Tak samo w przypadku innych modyfikacji - na przykład nowej ścieżki, której nie chcemy, żeby robot kosił.
Potem wystarczy tylko takie strefy połączyć tzw. "linkami", czyli trasami przejazdu robota, które "rysujemy" w taki sam sposób, jak granice obszaru koszenia i gotowe.

Zdecydowanie łatwiej też w taki sposób przygotować się na inne, czasem tymczasowe zmiany w ogrodzie. Rozstawiamy grilla w niedzielę, a przez całą resztę tygodnia nic tam innego - poza trawnikiem - nie ma? Z wykorzystaniem funkcji "Odjedź stąd" możemy utworzyć wokół nas albo wybranego punktu strefę, do której robot koszący przez określony czas nie będzie wjeżdżał. Grill cały, goście spokojni, trawa dookoła skoszona jak należy.
Wciąż nie jest to jednak wszystko, co możemy ustawić w aplikacji bez żadnego wysiłku. Przykładowo jednym kliknięciem możemy zmienić wysokość koszenia. Możemy też - dla każdej ze stref osobno - ustalić to, w jaki sposób robot będzie jeździł. Przykładowo jedna strefa może być koszona w układzie północ-południe, inna w układzie wschód-zachód, a jeszcze inna krzyżowo albo równolegle we wszystkich kierunkach. Wszystko zależy od naszych preferencji i od tego, jak chcemy, żeby wyglądał skoszony trawnik.
W ostatnim czasie aplikacja Stiga.GO doczekała się też całego szeregu innych usprawnień i nowych funkcji. Bezpośrednio z jej poziomu możemy teraz uzyskać np. dostęp do pomocy technicznej, w razie problemów z robotem koszącym dostaniemy powiadomienie, że coś jest nie tak (albo po prostu - że zakończono koszenie), na żywo widzimy też mapę koszonego obszaru wraz z procentowym wskaźnikiem ukończenia zadania.
Czy to faktycznie jest łatwiejsze w obsłudze od przewodowego robota koszącego? I czy naprawdę działa?
Odpowiedzi na oba te pytania brzmią tak samo: tak. Robot koszący STIGA z systemem AGS jeździ po moim ogrodzie już od dłuższego czasu i - pomimo tego, że warunki dla niego zdecydowanie nie są zbyt łaskawe - radzi sobie wyśmienicie. Pierwotnie narysowana strefa przestrzegana jest wzorowo - wsadziłem nawet specjalne urządzenia pomiarowe (znaczy: patyczki od szaszłyków) w losowych punktach na obwodzie strefy i... stoją tam do tej pory, co oznacza, że robot nie ucieka ze swojego miejsca pracy.

Ani razu też nie było żadnego problemu ze zgubieniem sygnału - a przynamniej nie takim, który spowodowałby, że robotowi trzeba byłoby pomóc. O innych problemach - nawet jeśli wystąpiły - nie wiem, bo robot zawsze rano wyjeżdża ze stacji i po skończonej pracy do niej wraca. Z obsługowego punktu widzenia całość jest - przynajmniej u mnie - tak samo bezobsługowa, jak przewodowy robot. Tyle że bez całego tego układania przewodów, a z zyskiem m.in. w postaci sprawniejszej i bardziej wydajnej pracy. Robot koszący z systemem AGS nie jeździ bowiem losowo - jak robot "przewodowy" - więc samo koszenie zajmuje mniej czasu, co przekłada się też po prostu na krótszy kontakt naszego wymarzonego tawnika z kołami robota.
Czy jest natomiast łatwiej, jeśli chodzi o konfigurację? Absolutnie i bezdyskusyjnie tak. Przykładowo do tej pory instalowałem już - jeśli mnie pamięć nie myli - trzykrotnie przewód ograniczający obszar koszenia. I za każdym razem było albo tak nie do końca idealnie, albo uznałem, że w sumie dobrze byłoby mieć skoszony jeszcze dodatkowy kawałek ogrodu, którego nie ująłem w pierwotnym planie pętli.
Czy kiedykolwiek faktycznie zabrałem się za to, żeby przeciąć przewód i dosztukować nowe strefy? A skąd, nigdy w życiu. Czy w kilka minut doklikałem sobie dodatkowe strefy w aplikacji, mając robota koszącego, który nie wymaga przewodu? Oczywiście.
I to jest prawdopodobnie jedna z największych zalet całego tego rozwiązania. Nie zostajemy z zamrożonym kształtem ogrodu, bo jakiekolwiek zmiany prowadziły do re-instalacyjnych komplikacji. Zmieniamy coś w ogrodzie, sięgamy po aplikację, wprowadzamy zmiany w 5 minut i już wszystko działa tak sprawnie, jak wcześniej. W końcu ogród może być zrobiony pod nas, a nie pod kosiarkę.