Ten robot sam muruje ściany. Oto jak działa
Tuż przed długim weekendem zakończyła pierwsza w Polsce budowa, na której ściany wznosi robot WLTR od firmy wienerberger. Na czym jednak tak naprawdę polega jego praca, czego potrzebuje do działania i jak wygląda cała operacja krok po kroku?

Na początek robota trzeba oczywiście dostarczyć na plac budowy, przy czym nie musi tego robić sam inwestor. W ramach usługi wznoszenia ścian z robotem od wienerberger dostaje on od razu cały pakiet, wliczając w to zarówno transport na miejsce budowy, jak i operatorów oraz materiały.
Kiedy robot dotrze na plac budowy, trzeba go oczywiście ustawić w odpowiednim miejscu.

I tutaj dobra wiadomość - przemieszczanie robota na miejsce rozpoczęcia pracy nie wymaga już przesadnie specjalistycznego sprzętu. Widziałem na własne oczy, jak WLTR został - z wykorzystaniem wózka, tzw. paleciaka - przepchnięty z jednego miejsca na drugie. Przy okazji całość została zaprojektowana tak, żeby mieściła się na szerokość w standardowych otworach na drzwi, więc nie ma ryzyka, że robot wzniesie ściany pomieszczenia, a potem nie będzie się go dało stamtąd wyprowadzić.
Przed branżą budowlaną stoi wiele wyzwań. Można tutaj wspomnieć o efektywności kosztowej procesu budowlanego, o bezpieczeństwie, o braku wykwalifikowanej kadry, o kwestiach dotyczących ochrony środowiska oraz ogólnie pojętej digitalizacji. Robot WLTR odpowiada na wszystkie te wyzwania - Grzegorz Wawer, Dyrektor Komercyjny wienerberger w Polsce
Po tym, jak robot trafi już na właściwe miejsce, należy sprawdzić, czy jest ustawiony równolegle do ściany i w odpowiedniej odległości. Nie jest tu wymagana milimetrowa precyzja, więc cały proces przygotowania do pracy w innym miejscu, który miałem okazję oglądać, trwał zaledwie kilka minut.

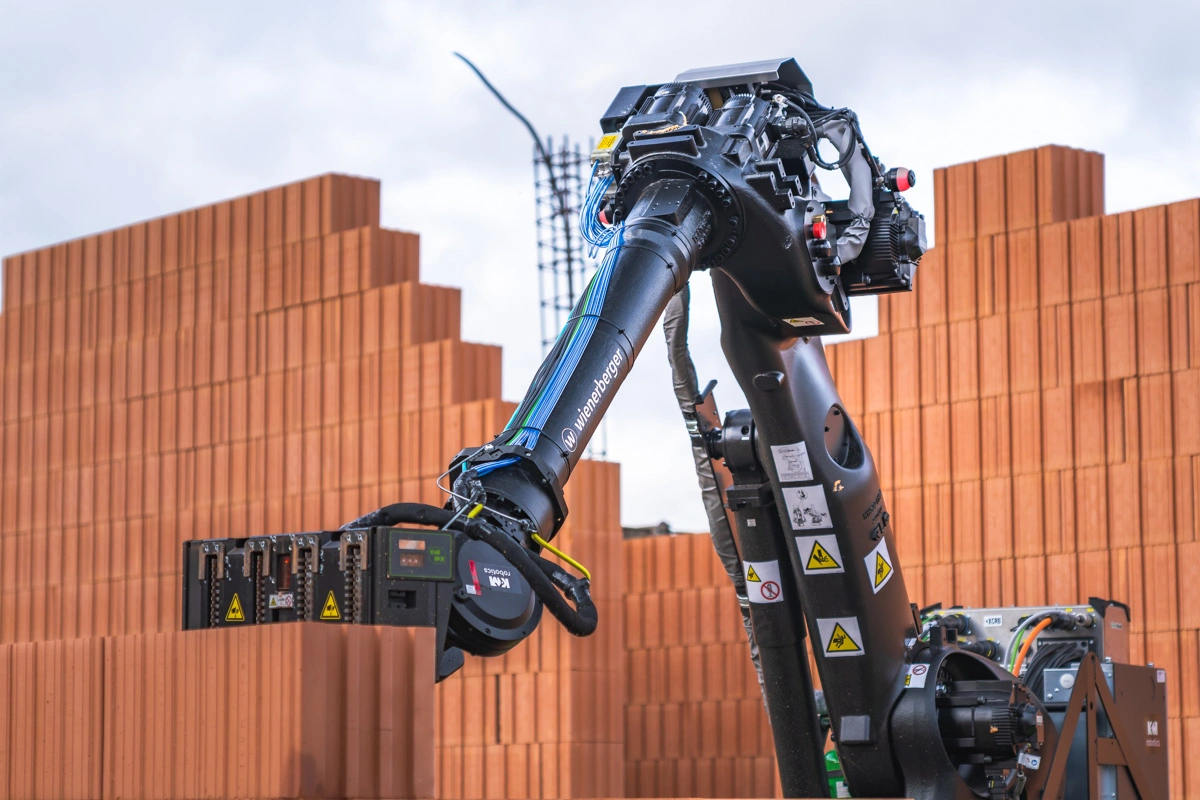
To, czego robot potrzebuje w tym momencie do wykonania swojej pracy, to przyłączenie do wody (którą w temperaturach dodatnich zwilża się łączoną potem pianoklejem powierzchnię pustaków), prąd oraz oczywiście materiały do budowy. WLTR wykorzystuje odpowiednio przygotowane pustaki Porotherm Dryfix i łączy je na cieniutką warstwę pianokleju Portherm Dryfix.

Dostosowanie pustaków do robota polega jedynie na dodaniu rowków, dzięki którym robot jest w stanie je złapać i przenosić. I dzieje się to już na etapie produkcji – pustaki dostajemy w wersji dostosowanej do robota.
Pustaki Porotherm Dryfix, których potrzebuje robot są zmodyfikowane już na linii produkcyjnej tak, by ramię robota mogło chwycić je od tylko jednej strony licowej a nie od góry, za drążenia. Dzięki temu możemy murować z bardzo wysoką precyzją oraz możemy murować ściany w konstrukcji żelbetowej, która już jest wcześniej wykonana - mgr inż. Mirosław Rzeszutko, Kierownik Działu Zarządzania Produktem w wienerberger.
Oczywiście robotowi WLTR nie trzeba podawać pustaka po pustaku.
WLTR zamiast tego prosi o podstawienie mu całej palety - i to niemal dosłownie. Przed rozpoczęciem prac, oraz po zużyciu każdej palety, robot sam wskazuje niewielką czerwoną kropką, gdzie ma zostać ulokowany narożnik kolejnej palety z produktami.

Następnie, z wykorzystaniem m.in. LiDAR-u, sam sprawdzi, czy wszystko się zgadza.
Pozostaje jeszcze ustalenie - z wykorzystaniem odpowiedniego znacznika - płaszczyzny murowanej ściany i można przejść do działania. Jeśli wszystko będzie w porządku - robot w uroczy sposób przytakuje ramieniem. Jeśli nie - pokręci nim przecząco.

Do całej obsługi wystarczą przy tym dwie osoby - operator i pomocnik, a proces programowania i działania robota odbywa się na będącym częścią urządzenia specjalnym tablecie.
Robot jest sterowany z pozycji tabletu. W tablecie należy wprowadzić odpowiednie wymiary ściany. Jeśli są to proste wymiary typu 2x5 m, wówczas robi się to bezpośrednio z poziomu tabletu. Jeśli ściana jest bardziej skomplikowana, można ją zaprojektować na komputerze, a następnie za pomocą kodu QR wgrać do robota - mgr inż. Mirosław Rzeszutko, Kierownik Działu Zarządzania Produktem w wienerberger
Od tego momentu robot zbyt wiele od nas już nie wymaga.
Cykl pracy zaczyna od skierowania ramienia w stronę palety z pustakami. Przed pobraniem pustaków robot skanuje paletę, sprawdzając czy nie ma elementów uszkodzonych a ewentualne uszkodzenia są „zgłaszane” operatorowi. Pomocnik, który wspiera operatora usuwa wówczas cegłę z palety a robot chwyta go za cztery specjalne rowki, dopasowane do uchwytów na ramieniu.

Taki pustak a właściwie dwa pustaki jednocześnie są następnie przesuwane wzdłuż aplikatora z pianoklejem, znajdującego się na frontowej części robota a dalej przenoszone już na murowaną ścianę.

Ten proces również jest niemal w całości zautomatyzowany - po stronie człowieka jest wyłącznie dbanie o ewentualne uzupełnianie zapasów zaprawy, czyli - wymianę opakowania z pianoklejem.

Tak przygotowany pustak jest dalej transportowany już do murowanej ściany:

Po czym zdecydowanym ruchem pustaki zostają ułożone a dzieje się to z precyzją, której mogłoby pewnie pozazdrościć wielu nawet doświadczonych murarzy.

Gdy taki cykl się zakończy, robot startuje od początku.
Ponownie kieruje ramię w stronę palety z pustakami, sprawdza, pobiera, nakłada pianoklej, układa cegły w murze. I tak do momentu, aż albo zakończy zaprogramowane zadanie, albo skończą się pustaki na palecie. Nie ma większego znaczenia, czy świeci słońce, pada deszcz, jest ciepło czy zimno - robot pracuje właściwie bez przerwy, niezależnie od warunków, również przy lekkim mrozie (do -5 st. Celsjusza).

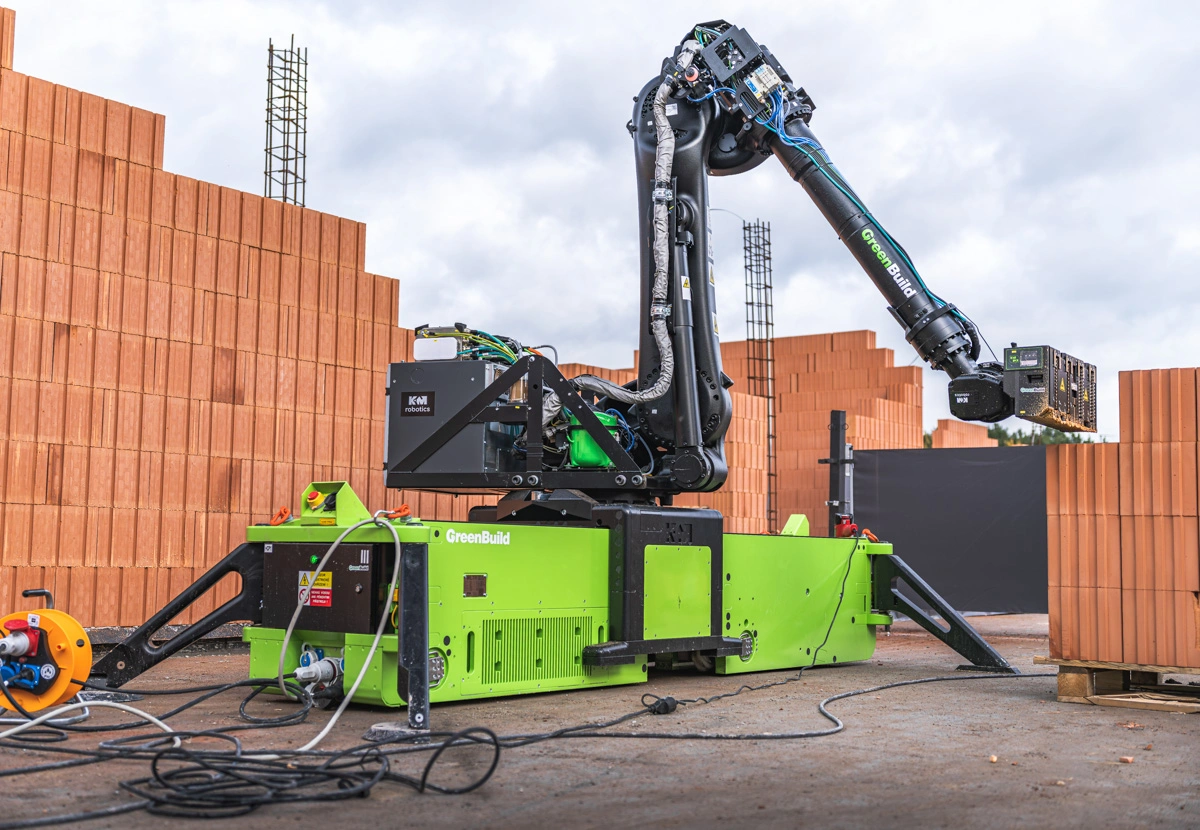
Co istotne, nawet jeśli robot wybuduje fragment ściany, przy której stoi bezpośrednio, nie trzeba go przesuwać, żeby kontynuować prace. WLTR wyposażono w hydrauliczny system, który umożliwia mu poruszanie się nie tylko w obrębie podstawy, ale też przesuwanie całej podstawy wzdłuż murowanej ściany.

Jeśli zajdzie taka potrzeba, centralna część robota jest w stanie zaprzeć się na ziemi specjalnymi elementami, unieść podstawę i przesunąć ją kawałek dalej.
Transport robota odbywa się na dwa sposoby. Jeśli potrzebujemy przewieźć robota na duży dystans i ustawić go na odpowiednim miejscu na budowie, robimy to za pomocą zwykłego wózka widłowego. Natomiast po ustawieniu ściany, która jest budowana, robot przemieszcza się już samoczynnie. Ma system hydrauliczny, który pozwala podnieść cały korpus i przesunąć wzdłuż ściany, którą muruje - mgr inż. Mirosław Rzeszutko, Kierownik Działu Zarządzania Produktem w wienerberger
W rezultacie robot przy budowie dłuższych murów wymaga niemal wyłącznie dostarczania mu niezbędnych materiałów - całą resztę robi sam. Sam też oczywiście zgłosi, kiedy na przykład potrzebuje nowej dostawy pustaków i – tak, jak miało to miejsce przy starcie - wskaże lokalizację, gdzie taką paletę należy mu podstawić.
Jak szybko taki robot wznosi ściany?
Błyskawicznie. Jeśli chodzi o teorię, to jest to 10 m2 ściany w ciągu godziny. Jeśli chodzi o praktykę, to na pierwszej polskiej budowie z wykorzystaniem tego robota w ciągu siedmiu dni roboczych wzniesiono 600 m2 ścian. Czyli operacja zajęła dwukrotnie mniej czasu, niż miałoby to miejsce w przypadku 3-osobowej ekipy murarskiej.
Ściany, które aktualnie jest w stanie wykonać robot to ściana o maksymalnej wysokości 3,25 m i przy takiej ścianie prostej, pełnej, wykonuje je rzeczywiście z prędkością do 10 m2 na godzinę. Jeśli w ścianie znajdą się otwory, potrzebujemy więcej elementów dociąć i ustawić ręcznie, to automatycznie ta wydajność spada. Średnia wydajność robota jest w granicach 5-6m2, ale to i tak jest szybciej niż standardowa ekipa czteroosobowa pracująca w systemie Dryfix ręcznie - mgr inż. Mirosław Rzeszutko, Kierownik Działu Zarządzania Produktem w wienerberger.

Celem wprowadzenia robota WLTR jest jednak wsparcie i wyręczenie człowieka od ciężkiej pracy a nie - jak można by pomyśleć - zastąpienie ludzi na placu budowy. Nadal są niezbędni do jego obsługi - robot wienerberger po prostu zdejmuje z nich te najtrudniejsze, najbardziej powtarzalne i niebezpieczne zajęcia.
Przede wszystkim chodzi o poprawę bezpieczeństwa na budowie i ergonomii pracy. Te najcięższe prace związane z przenoszeniem pustaków i układaniem ich w murze są wykonywane przez maszynę. I to jest podstawowa zaleta tego urządzenia. Dzięki temu mamy nadzieję, że na budowie za kilka lat, kiedy tego typu urządzenia będą coraz bardziej powszechne, będziemy widzieć coraz więcej osób, które będą chciały przyjść na budowę, które będą chciały te pracę wykonywać, bo jest prostsza, przyjemniejsza, zdecydowanie bardziej bezpieczna i przyjazna człowiekowi niż standardowe dźwiganie pustaków, murowanie i układanie ich na czasem dość dużej wysokości - mgr inż. Mirosław Rzeszutko, Kierownik Działu Zarządzania Produktem w wienerberger
Dzięki robotom WLTR pracownik-murarz zmienia się w osobę, która operuje robotem. Która za pomocą tabletu, tak dobrze znanego młodemu pokoleniu, muruje ściany. Dzięki digitalizacji oraz robotyzacji procesu budowlanego chcemy zachęcić młodych ludzi do podejmowania edukacji w szkołach technicznych o profilach budowlanych oraz zachęcać ich do pracy w budownictwie - Grzegorz Wawer, Dyrektor Komercyjny wienerberger w Polsce.