Zapomnij o robotach z przewodem. Ten model odsyła je na emeryturę
Ile czasu potrzeba, żeby zainstalować robota koszącego? 3 minuty. I nie, nie przesadzam nawet o odrobinę. Sam kilka tygodni temu przeszedłem właśnie taki proces.

Jednocześnie doskonale pamiętam, jak wyglądał proces instalacji przewodowego robota w dokładnie tym samym ogrodzie i wiem jedno - do robota "z kablem" nie wrócę już nigdy. Chociażby dlatego, że ten ogród, w który obecnie jeździ najnowsza, testowa Stiga A 6v, wygląda z roku na rok inaczej.
Ba, jestem przekonany, że za miesiąc będzie wyglądał inaczej, niż w momencie pisania tego tekstu.

To jak wygląda proces instalacji takiego robota?
W moim przypadku - i w przypadku A 6v - wyglądało to mniej więcej tak, jak w przypadku robota sprzątającego w domu. Czego w żaden sposób nie dałoby się napisać o robocie koszącym z przewodem - wiem, bo robiłem przewodową instalację i samodzielnie, i w trybie "patrzę jak ktoś pracuje za mnie", i to... trwało.
A tutaj? Więcej czasu zajął mi demontaż stacji ładowania modelu A 1500 i przeniesienie całości, razem z moim robotem, do szopy, niż instalacja nowego modelu. Wyjmujemy stację ładowania z kartonu, ustawiamy, montujemy dołączonymi do zestawu kołkami, doczepiamy daszek, ustawiamy element ze stykami ładowania we właściwej pozycji, szukamy gniazdka, wstawiamy robota na platformę.

Gotowe.
A co z anteną GPS RTK? Skoro nie ma przewodu, to chyba powinna być?
Nie w tym przypadku. Owszem, dalej mamy tutaj precyzję GPS RTK, ale nie jest już do tego potrzebna dodatkowa stacja referencyjna. Robot sam pobierze wszystkie niezbędne dane.
I to już wszystko?
Nie do końca. Ale jeśli chodzi o "robotę", to tak. Od tego momentu zostaje nam sięgnąć po telefon, aktywować tryb wyznaczania koszonego obszaru i ruszyć za robotem, wskazując mu jak najdokładniej granice koszonych obszarów i ścieżki między nimi.
A jeśli się pomylę?
To nic się nie stanie, bo w dowolnej chwili można te granice przesuwać. Jest to o tyle wygodne, że możemy je przesuwać - z poziomu aplikacji - albo ponownie "rysując" wybrany fragment robotem, albo przesuwając wybrane fragmenty bez udziału robota.

Przykładowo - widzimy, że robot jednak kosi jakieś 10 cm dalej od granicy, niż byśmy tego chcieli. Przesuwamy całą granicę o równe 10 cm, zapisujemy, gotowe. Następnym razem robot skosi i ten pomijany do tej pory pas.
Spróbujcie zrobić to samo z robotem koszącym "z przewodem", np. po przesunięciu granicy rabat. To będzie zabawa na dłuższą chwilę.
No dobra, ale to samo już było pisane o robotach z GPS RTK chwilę temu.
Owszem, zachwycałem się już wolnością od przewodów już poprzednim razem i ten zachwyt podtrzymuję. W warunkach zmieniającego się cały czas obszaru - a nawet obszarów - mojego trawnika, możliwość łatwej zmiany granic czy wykluczenia np. terenu dosiewki, jest niesamowitym ułatwieniem.

W tym roku jednak w końcu na dłużej zawitał u mnie robot nie tylko z GPS RTK, ale i z kamerą. I w skrócie - to zmienia wszystko.
Co dokładnie zmienia?
W moim przypadku - przede wszystkim dwie rzeczy.
Po pierwsze - mój trawnik teoretycznie nie jest idealnym trawnikiem do pracy z robotem z GPS RTK. Liczba wysokich, rozłożystych drzew jest spora, dookoła też rosną kolejne budynki. Widoczność nieba - bardzo, bardzo umiarkowana.
I w przypadku robota z samym GPS - czasem jest to niestety zauważalne w działaniu robota. W przypadku A 6v - jak na razie nie udało mi się wychwycić żadnego błędu, nawet pomimo tego, że robot pracuje intensywnie, a momentami ma naprawdę trudny - nawigacyjnie i nie tylko - teren do pokonania.
Mam więc tutaj święty spokój, że jeśli nawet coś pójdzie nie tak w kwestiach lokalizacyjnych "z satelity", to robot i tak zauważy ewentualną przeszkodę i nie postanowi w nią wjechać.

To zresztą też druga spora zaleta tego systemu. O ile mój robot koszący bez kamery był w stanie stwierdzić obecność przeszkody przez odbicie się od niej i późniejsze zapisanie jej na mapie lub ręczne "narysowanie" przeszkody, tak ten z kamerą radzi sobie z tym o wiele lepiej.
Po pierwsze - ominie "coś nowego", co zostanie postawione na trawniku, a nie zostało wcześniej wrysowane. Po drugie - można, nawet dla każdej ze stref osobno, wskazać, jak robot ma się zachowywać w okolicy przeszkód. Przykładowo - może do nich delikatnie dojeżdżać, kosząc możliwie najbliżej, a może też absolutnie unikać kontaktu, wybierając odpowiednią, omijającą ścieżkę koszenia.
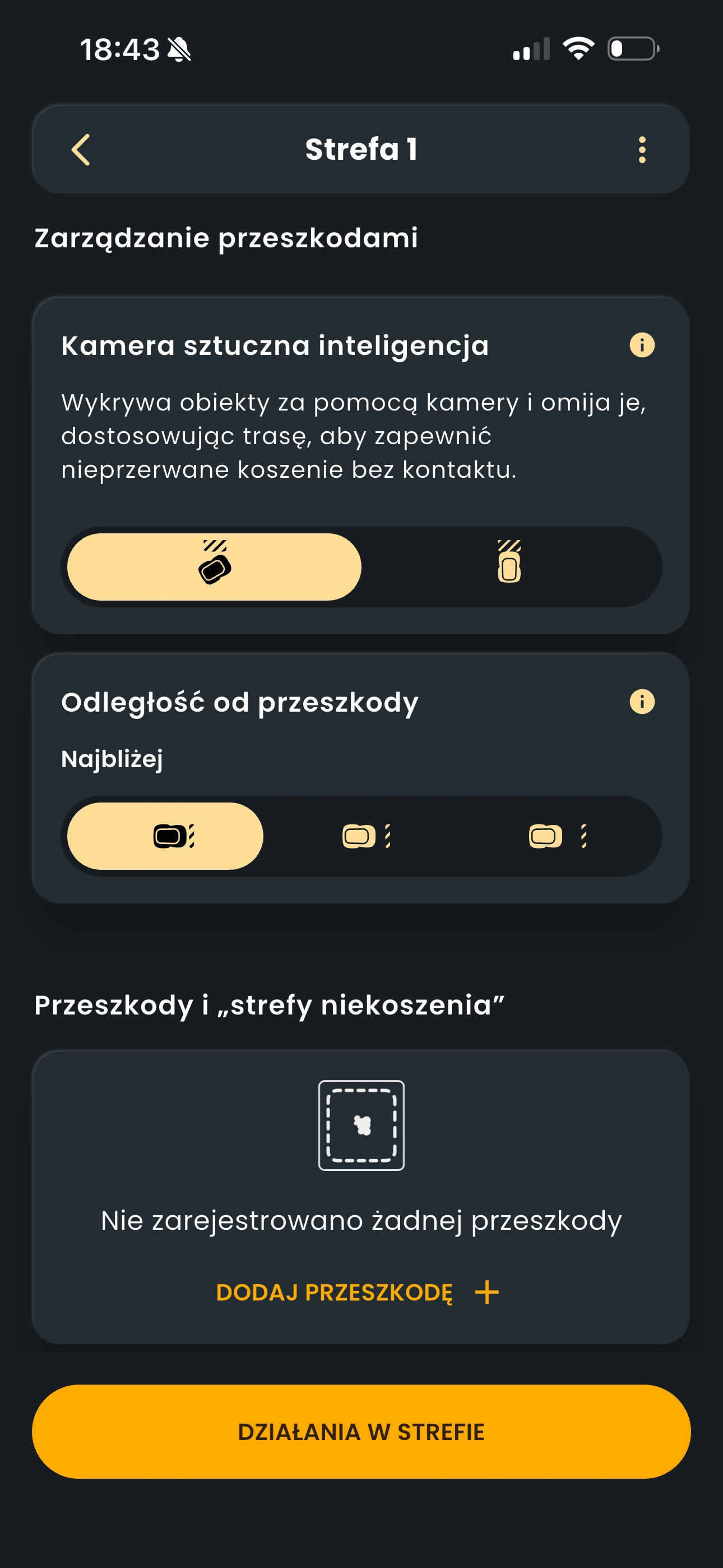
W bonusie - z kamerą można wprowadzać "mniejsze" przeszkody na stałe na mapę (0,3 m kontra 0,5 m wcześniej), a do tego dzięki kamerze można... lepiej kosić przy krawędziach.
Jak to koszenie przy krawędziach tutaj działa?
Standardowo robot robi po prostu dwa okrążenia "krawędziowe" - najpierw kawałek od krawędzi, a potem dopiero po krawędzi.
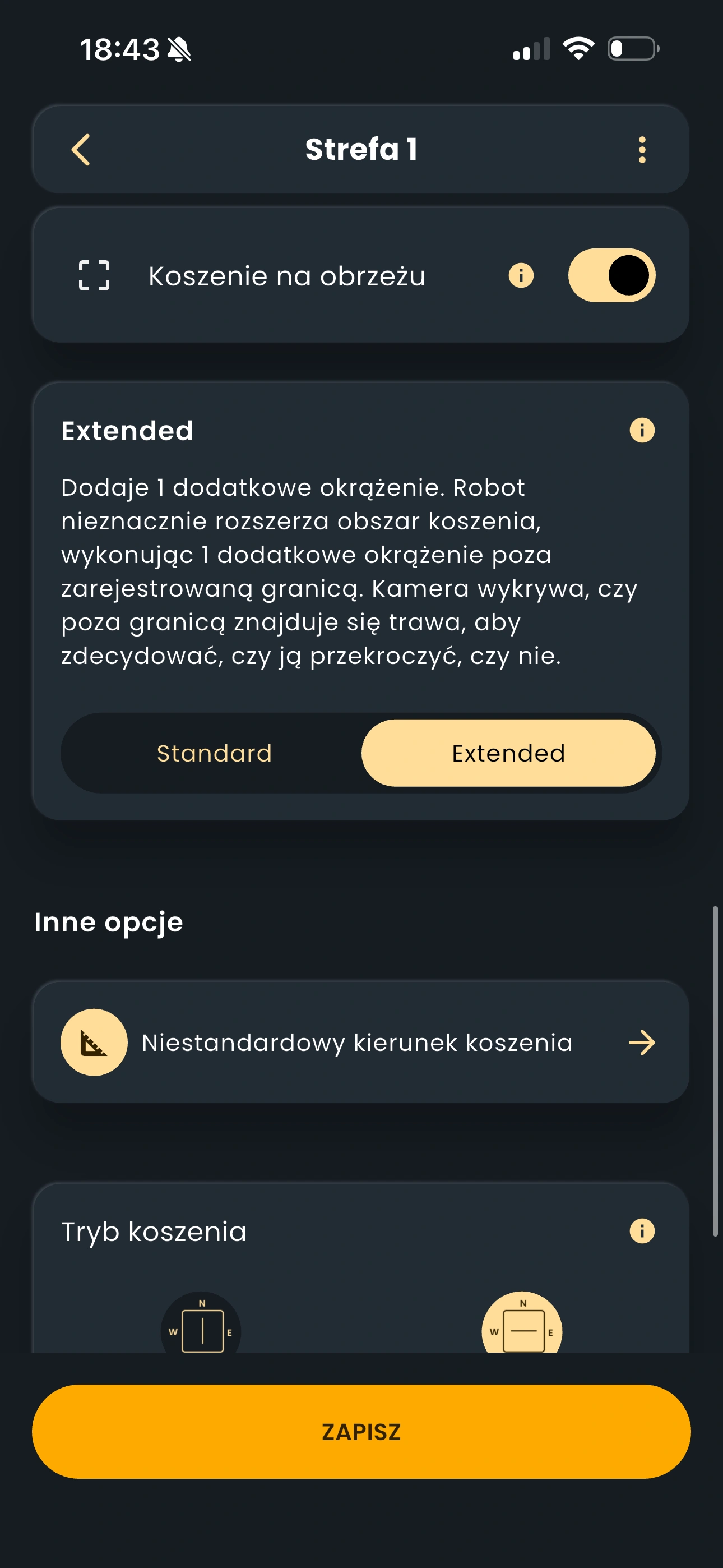
Z kamerą można natomiast włączyć trzecie okrążenie, w którym robot może poruszać się odrobinę poza narysowaną przez nas granicę. Kamera służy tutaj do tego, żeby wykryć, czy poza wirtualną krawędzią jest trawa i czy faktycznie warto tam w ogóle wyjeżdżać.

Oczywiście nie zadziała to przy każdej konfiguracji ogrodu i obrzeży, ale jeśli ktoś ma np. niskie obrzeże, zrównane z poziomem trawnika, a za nim usypaną korę albo coś podobnego - możemy w ten sposób "za darmo" skosić trawę idealnie również na samej krawędzi ogrodu. Co zresztą udało się też i u mnie.
A z przewodem...
... z przewodem niekoniecznie wszystko udałoby się tak, jak trzeba. Owszem, ten system działa, sprawdzał się przez lata, ale są już po prostu lepsze rozwiązania.
Przykładowo - w tym roku robiłem, własnoręcznie, obrzeże trawnika. Jako że była to praca popołudniowa i dość spontaniczna, do samego końca nie byłem pewny ani tego, jak będzie to obrzeże przebiegało, ani kiedy zakończy się jego układanie.

Przy robocie z przewodem - musiałbym wszystko dokładnie zaplanować, potem trzymać się tego planu a na czas zostawienia odsłoniętego wykopu najlepiej robota z tego obszaru wykluczyć, bo przecież wpadłby do dziury. A z GPS RTK? "Rysuję" sobie szybko strefę wykluczoną, zatwierdzam, pracuję. Jak skończę obrzeże - skoryguję mapę i robot zacznie kosić i tam. Do tego momentu - mam zadbaną jak trzeba resztę trawnika, przy minimalnym wysiłku z mojej strony.
Nie wspominając już nawet o wspaniałym wizualnie koszeniu w pasy...
Pięknie, ale też pewnie kosztuje fortunę?
Niekoniecznie. Owszem, roboty koszące z GPS RTK przez lata związały się ze stereotypem "drogie", a jeśli do tego dorzucić jeszcze kamerę, to może brzmieć bardzo drogo.
Natomiast w tym przypadku nie jest to już prawdą. Koszący obecnie u mnie A 6v, który obsłuży trawniki do 600 m2, kosztuje w większości sklepów ok. 4 tys. zł. Tak, dalej jest to spory wydatek, ale jednocześnie - w moim przypadku wystarczyło kilka przejazdów robota po trawniku, żebym wiedział, że to jest to. I że do "przewodu" nie ma już żadnego powrotu.
Redaktor prowadzący Spider’s Web i autor tekstów na Autoblogu. Od 2008 r. nieprzerwanie publikujący w serwisach internetowych, a od ponad 10 lat na stałe związany z Grupą Spider’s Web. Regularnie pisze o tym, co go fascynuje - o smart domu, zegarkach sportowych, motoryzacji i… rowerach. A że przy okazji uwielbia porządek, jeśli w redakcji pojawi się odkurzacz albo robot koszący do przetestowania, trafi właśnie do niego. Do tej pory napisał setki recenzji i - uwaga - większość sprzętów, które rekomendował, później sam sobie kupił.