Robot nie wygląda jak człowiek, ale i tak jest kozacki. Ma 20 nóg
Zamiast udawać człowieka albo psa, Argus wygląda dosłownie jak morski jeżowiec. Naukowcy pokazali robota, który nie ma przodu, tyłu ani słabej strony.
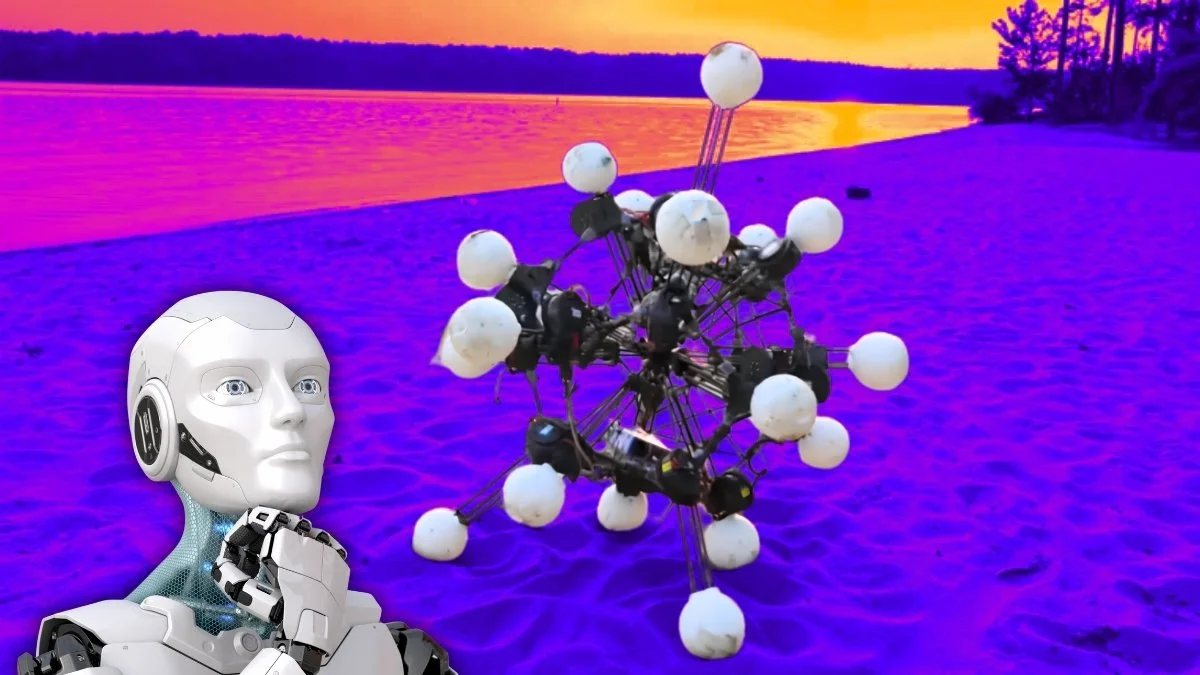
Najbardziej zaawansowany robot przyszłości wcale nie musi wyglądać jak człowiek, pies ani owad. Argus, prototyp opracowany na Duke University, przypomina raczej mechanicznego jeżowca z 20 nogami i 20 oczami. Nie ma przodu, tyłu, góry ani dołu w klasycznym sensie. Właśnie dlatego potrafi robić coś, z czym wiele znanych robotów wciąż ma problem: ruszać, widzieć i reagować równie dobrze w każdym kierunku.
Roboty zbyt długo próbowały wyglądać znajomo
Robotyka przez lata bardzo często szła tropem biologii. Skoro człowiek chodzi na dwóch nogach, to budowano humanoidy. Skoro pies dobrze radzi sobie w terenie, to powstawały roboty czworonożne. Skoro owady są sprawne i odporne, to projektowano maszyny inspirowane insektami. Takie podejście ma sens, bo natura przez miliony lat testowała różne sposoby ruchu.
Problem polega jednak na tym, że robot nie musi mieć ciała zwierzęcia, żeby dobrze wykonywać zadanie. Czasem kopiowanie biologii narzuca ograniczenia, których maszyna wcale nie potrzebuje. Humanoid wygląda efektownie, ale ma wyraźny przód, tył, górę, dół, balansuje jak człowiek i po upadku musi wrócić do właściwej pozycji. Robot czworonóg świetnie radzi sobie w wielu warunkach, ale też ma określoną orientację i zwykle musi ustawić się względem przeszkody.
Zespół z General Robotics Lab na Duke University nie zaczął od pytania, jakie zwierzę warto skopiować. Zaczęto od pytania, jak zaprojektować robota, który nie ma uprzywilejowanego kierunku ruchu. Nie chodzi więc o podobieństwo do natury, lecz o funkcję.
Efekt wygląda dziwnie, ale jest bardzo logiczny. Argus ma kulistą, modułową konstrukcję, 20 teleskopowych nóg rozmieszczonych promieniście wokół centralnego korpusu i po 1 kamerze głębi na końcu każdej nogi. Może widzieć otoczenie dookoła siebie i działać tak, jakby pojęcia przód oraz tył straciły po prostu znaczenie.
Nie ma słabej strony, bo nie ma przodu ani tyłu
Argus nie ma jednego kierunku, w którym jest naturalnie najlepszy, i drugiego, w którym jest wyraźnie gorszy. Dla wielu robotów to duży problem. Maszyna może świetnie przyspieszać do przodu, ale gorzej cofać się, skręcać, reagować po uderzeniu albo zmieniać pozycję bez obrotu całego ciała.
Argus został zaprojektowany tak, by centrum masy można było przyspieszać możliwie równomiernie w każdym kierunku. Naukowcy opisują to jako dynamiczną izotropię. W fizyce izotopia oznacza, że właściwości są takie same niezależnie od kierunku. W przypadku robota chodzi o zdolność do działania: czy potrafi ruszyć, przyspieszyć, ustabilizować się i zmienić ruch równie dobrze w różnych stronach.
Skala tej cechy wynosi od 0 do 1. Wartość 1 oznaczałaby ideał, czyli pełną symetrię dynamiczną. Według badaczy wiele współczesnych robotów, w tym zaawansowane czworonogi, humanoidy i klasyczne drony, osiąga wyniki poniżej 0,6. Argus uzyskał 0,91. To oznacza, że jest bardzo blisko teoretycznego maksimum.
20 nóg to nie widzimisię, tylko wynik obliczeń
Argus nie dostał 20 nóg dlatego, że ktoś chciał zbudować po prostu dziwnie wyglądającą maszynę do nagrań w internecie. Kształt robota jest wynikiem szerokiego przeszukiwania możliwych konfiguracji. Badacze przeanalizowali ponad 1500 projektów i sprawdzali, jak różne układy wpływają na ruch, stabilność, odporność, śledzenie trajektorii i sprawność w trudnym terenie.
Korpus Argusa wykorzystuje geometrię zbliżoną do dwunastościanu foremnego. To bryła mająca 12 pięciokątnych ścian. W robotyce taka geometria pozwala równomiernie rozmieścić nogi i sensory wokół ciała, dzięki czemu robot nie ma jednego przedniego zestawu kończyn i jednego tylnego zestawu, który tylko pomaga.
Każda noga jest liniowym, wysuwanym aktuatoriem, czyli elementem wykonawczym, częścią, która zamienia polecenie sterownika na ruch. W Argusie nogi mogą się wysuwać i chować, wpływając bezpośrednio na położenie środka masy oraz kontakt z otoczeniem. To bardziej przypomina sterowanie całym ciałem, niż zwykłe przebieranie nogami.
Argus widzi całym ciałem
Drugim przełomowym elementem jest samo widzenie. Każda z 20 nóg ma kamerę głębi, czyli sensor pozwalający oceniać odległość do obiektów. Dzięki temu Argus nie tylko porusza się w każdym kierunku, lecz także ma dookólną percepcję. Nie patrzy przed siebie, bo w jego przypadku przed siebie może być wszędzie.
Ma to szczególne znaczenie w zastosowaniach terenowych i ratowniczych, gdzie otoczenie jest dynamiczne i trudne do przewidzenia. W lesie, na gruzowisku, piaszczystym podłożu czy podczas eksploracji powierzchni innych planet przeszkody mogą pojawiać się z dowolnego kierunku. Skuteczna percepcja przestrzeni wokół całej konstrukcji zwiększa zdolność robota do nawigacji i szybkiego reagowania na zmieniające się warunki.
Dzięki rozproszonym sensorom Argus zachowuje pełną świadomość otoczenia także podczas dynamicznych zmian kierunku ruchu. W przeciwieństwie do konstrukcji opartych na pojedynczym module obserwacyjnym lub zestawie kamer umieszczonych w jednym miejscu, system percepcji został zintegrowany z całą strukturą robota. Kamery rozmieszczone na końcach nóg tworzą rozproszoną sieć obserwacji, zapewniającą szerokie pokrycie przestrzeni wokół maszyny.
Robot może więc jednocześnie przemieszczać się, obracać, kontaktować z otoczeniem i obserwować przestrzeń wokół siebie. To otwiera drogę nie tylko do poruszania się, lecz także do manipulacji całym ciałem. Robot może pchać obiekty, stabilizować się na przeszkodach i używać wielu nóg jako punktów podparcia albo kontaktu.
Ten dziwny kształt ma sens
Argus przeszedł serię testów terenowych wykraczających poza standardowe warunki laboratoryjne. Badacze sprawdzali jego działanie na piasku, mokrych nawierzchniach, trawie, betonie oraz w środowisku leśnym. W trakcie prób robot pokonywał przeszkody, odzyskiwał stabilność po zewnętrznych zakłóceniach, poruszał się w wąskich przestrzeniach między ścianami i zachowywał zdolność przemieszczania się mimo częściowych uszkodzeń.
To ostatnie jest szczególnie ważne. Robot z wieloma kończynami ma naturalną redundancję, czyli nadmiarowość. Jeśli jedna albo kilka nóg przestanie działać, system nadal może próbować wykorzystać pozostałe. Według badaczy Argus potrafił działać nawet przy uszkodzeniu 3 nóg. Dla robota wysyłanego w teren, do akcji ratunkowej albo na inną planetę taka odporność będzie wprost bezcenna.
Argus potrafił również przenosić lub przesuwać obciążenie około 4,5 kg, zachowując przy tym dużą część swojej mobilności. To jeszcze nie jest maszyna gotowa do przemysłowej pracy, ale pokazuje, że konstrukcja nie jest tylko zabawką do efektownego przemieszczania. Może w przyszłości stać się platformą do przenoszenia sensorów, narzędzi albo niewielkich ładunków.
Humanoidy nie znikną, ale przestaną być jedyną wizją przyszłości
Moda na humanoidy jest dziś ogromna. Firmy pokazują roboty kroczące po fabrykach, podnoszące pudełka, uczące się prac domowych albo współpracujące z ludźmi. To ma sens, bo świat człowieka jest zaprojektowany pod ciało człowieka: drzwi, schody, klamki, blaty, narzędzia i pojazdy są dostosowane do naszej wysokości, rąk i sposobu poruszania się.
Ale nie każde zadanie odbywa się w świecie zaprojektowanym dla ludzi. Gruzowisko po trzęsieniu ziemi, jaskinia, las, tunel, teren po powodzi, planeta bez infrastruktury albo wnętrze uszkodzonego obiektu przemysłowego to środowiska, w których ludzka sylwetka niekoniecznie jest przewagą. Czasem jest ograniczeniem.
Przeczytaj także:
Argus wskazuje inny kierunek rozwoju. Zamiast naśladować znane organizmy, konstrukcja została podporządkowana konkretnym wymaganiom funkcjonalnym. W takim podejściu obecność głowy, twarzy czy klasycznie rozumianych kończyn nie jest konieczna, jeśli rozproszona architektura zapewnia lepszą percepcję otoczenia, większą stabilność i skuteczniejsze reagowanie na zmieniające się warunki.
*Źródło grafiki wprowadzającej: Duke University; Canva Pro
Dziennikarz działu Technologie. O smartfonach i nowych technologiach zaczął pisać jeszcze w 2012 r. na łamach portalu Telix. Później przez pewien czas pisał dla KomputerŚwiat i dla nieistniejącego już PCLabu. Epizod dziennikarski zaliczył także w lokalnej gazecie i w dziale blogowym SpeedTest. Copywriter techniczny, motoryzacyjny i technologiczny. Współzałożyciel agencji marketingowej BlueCopy, zajmującej się copywritingiem i poligrafią. Przez pewien czas właściciel firmy transportowej. Prywatnie fan starych polskich oper mydlanych (oglądanych obowiązkowo z konkubiną), dumny opiekun kotki brytyjskiej i pasjonat-amator druku 3D.